|
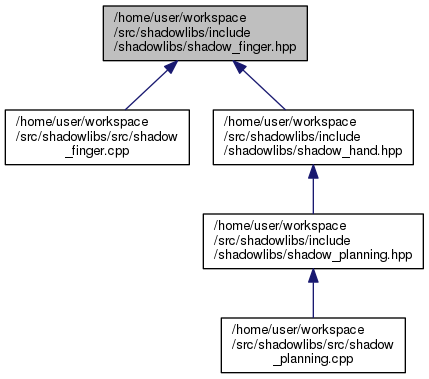
ShadowHandUtilityLibrary
|
#include <shadowlibs/shadow_utils.hpp>
Go to the source code of this file.
Classes | |
| struct | shadow_finger::Finger |
| Utility struct for managing each finger of Shadow Hand. Contains all the information about the Finger instance, including joint limits, MoveGroup, MoveIt plan, and joint control publishers. More... | |
| struct | shadow_finger::Finger::BioTac |
| Utility struct for managing the BioTac sensor attached to each finger. Holds the pressure and impedance data obtained from the sensor. More... | |
Namespaces | |
| shadow_finger | |
| Utility functions for managing each finger of Shadow Hand. Contains struct to hold necessary data about each finger, and each instance can be passed around to planning utilities. Also contains some functionality for operating on BioTac sensor attached to the respective finger. | |
Functions | |
| std::string | shadow_finger::getSavedStateName (std::string finger_name, std::string saved_state) |
| Get preloaded plan as string for open or close. More... | |
| std::string | shadow_finger::getMoveGroupName (std::string finger_name) |
| Get planning group names given common name for finger. More... | |
| std::vector< std::string > | shadow_finger::getJointNames (moveit::planning_interface::MoveGroupInterface &move_group_interface) |
| Get names of joints from given MoveGroupInterface. More... | |
| std::vector< std::string > | shadow_finger::getJointNames (moveit::planning_interface::MoveGroupInterface::Plan &plan) |
| std::vector< double > | shadow_finger::getJointValues (moveit::planning_interface::MoveGroupInterface &move_group_interface) |
| Get current values of joints from given MoveGroupInterface, they are in the same order as the names of joints obtained from getJointNames() More... | |
| std::vector< std::tuple< float, float > > | shadow_finger::getFingerJointLimits (std::vector< std::string > &joint_names) |
| Get limits of each joint in given vector of joint names. This is obtained from the /robot_description URDF passed to ROS from the robot. More... | |
| int | shadow_finger::getBiotacIdx (std::string &finger_name) |
| Fetch BioTac index given name of finger. More... | |
| std::vector< std::string > | shadow_finger::getJointNames (shadow_finger::Finger &finger) |
| std::vector< double > | shadow_finger::getJointValues (shadow_finger::Finger &finger) |
| std::ostream & | operator<< (std::ostream &os, const shadow_finger::Finger &finger) |
Variables | |
| static const std::vector< std::string > | shadow_finger::biotac_idx |
| Lookup table that maps finger name to BioTac index. More... | |
|
inline |
 1.8.11
1.8.11

